Research Projects
i-Octree: A Fast, Lightweight, and Dynamic Octree for Proximity Search
 |
Abstract: Establishing the correspondences between newly acquired points and historically accumulated data (i.e., map) through nearest neighbors search is crucial in numerous robotic applications. However, static tree data structures are inadequate to handle large and dynamically growing maps in real-time. To address this issue, we present the i-Octree, a dynamic octree data structure that supports both fast nearest neighbor search and real-time dynamic updates, such as point insertion, deletion, and on-tree down-sampling. The i-Octree is built upon a leaf-based octree and has two key features: a local spatially continuous storing strategy that allows for fast access to points while minimizing memory usage, and local on-tree updates that significantly reduce computation time compared to existing static or dynamic tree structures. The experiments show that i-Octree outperforms contemporary state-of-the-art approaches by achieving, on average, a 19% reduction in runtime on realworld open datasets. |
Camera, LiDAR and IMU based Multi-sensor Fusion SLAM: a Survey
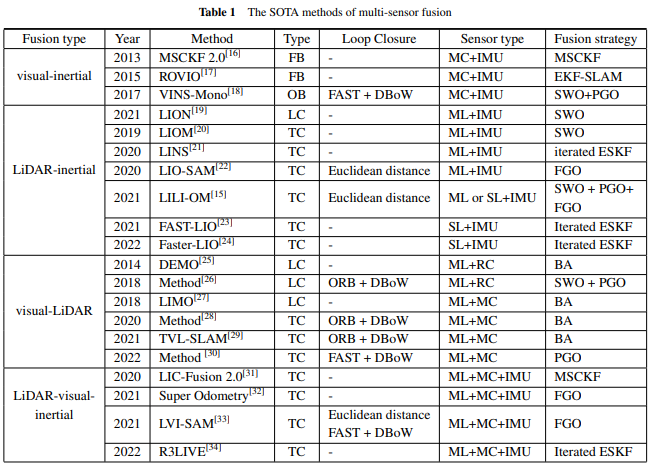 |
Abstract: In recent years, simultaneous localization and mapping (SLAM) technology has prevailed in a wide range of applications such as autonomous driving, intelligent robots, augmented reality (AR), and virtual reality (VR). Multi-sensor fusion using the most popular three types of sensors (e.g., visual sensor, LiDAR sensor, and IMU) is becoming ubiquitous in SLAM, in part because of the complementary sensing capabilities and the inevitable shortages (e.g., low precision, long-term drift) of the stand-alone sensor in challenging environments. In this article, we survey thoroughly the research efforts taken in this field and strive to provide a concise but complete review of the related work. Firstly, a brief introduction of the state estimator formation in SLAM is presented. Secondly, the state-of-the-art algorithms of different multi-sensor fusion algorithms are given. Then we analyze the deficiencies associated with the reviewed approaches and formulate some future research considerations. This paper can be considered as a brief guide to newcomers and a comprehensive reference for experienced researchers and engineers to explore new interesting orientations. |
Local Region Based RANSAC for Plane Segmentation in Large Point Cloud
 |
Abstract: 1) Designed a local region based RANSAC method for plane segmentation in large point cloud; 2) Introduced iterated Gaussian-Newton method in RANSAC for better plane paramenter estimation; 3) Evaluated results demonstrated that our method achieved lower cost and better repeatability compared with c++ pcl library. |
Edge Based Pose Estimation
 |
Abstract: 1) Designed a Unet based image edge detection method; 2) Developed a gray gradient reconstrcution by images edge; 3) Designed a pose estimation method by photometric error. |
Parallel Image Region Segmentation
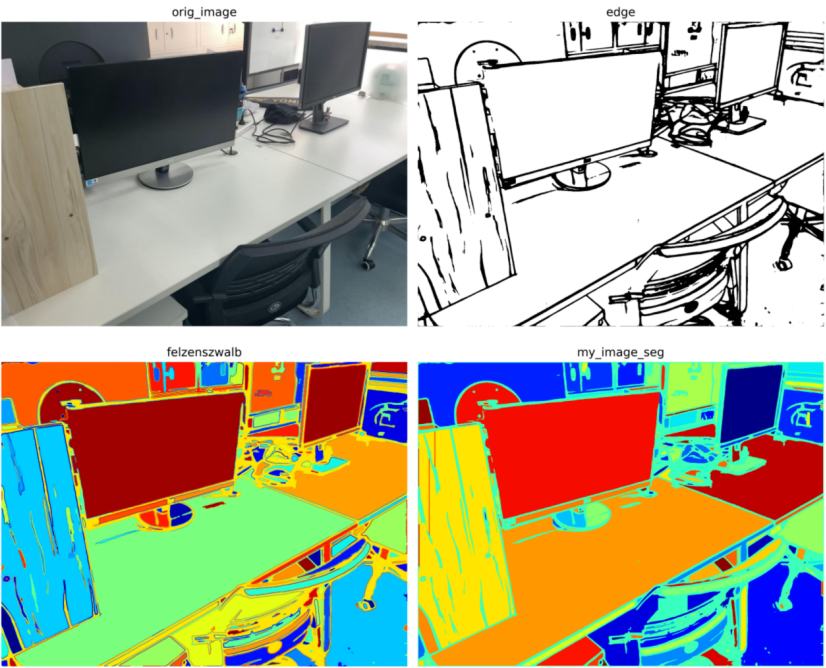 |
Abstract: 1) Designed a parallel image region segmentation which could be accelerated by GPU; 2)Evaluated our method on the testing dataset and found that our method was much faster than felzenszwalb. |